|
Yingda Yin 尹英达
Ph.D. student Email: yingda.yin at pku.edu.cn yingda.yin at gmail.com |

|
|
|
|
|
| *: equal contribution; † corresponding author(s) |
|
arXiv / code A real-time dense scene reconstruction system that regresses 3D points from video frames using feed-forward neural networks, without explicitly estimating camera parameters. |
|
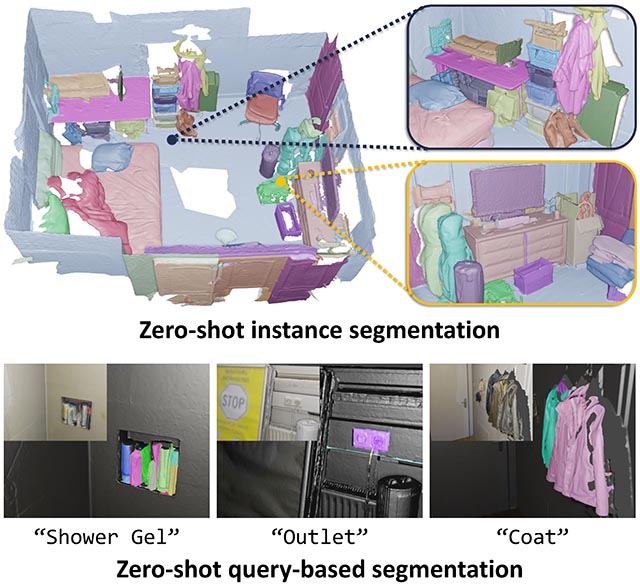
arXiv / project page / code A zero-shot 3D instance segmentation approach that synergistically leverages geometric priors and semantic cues derived from Segment Anything Model (SAM). |
|
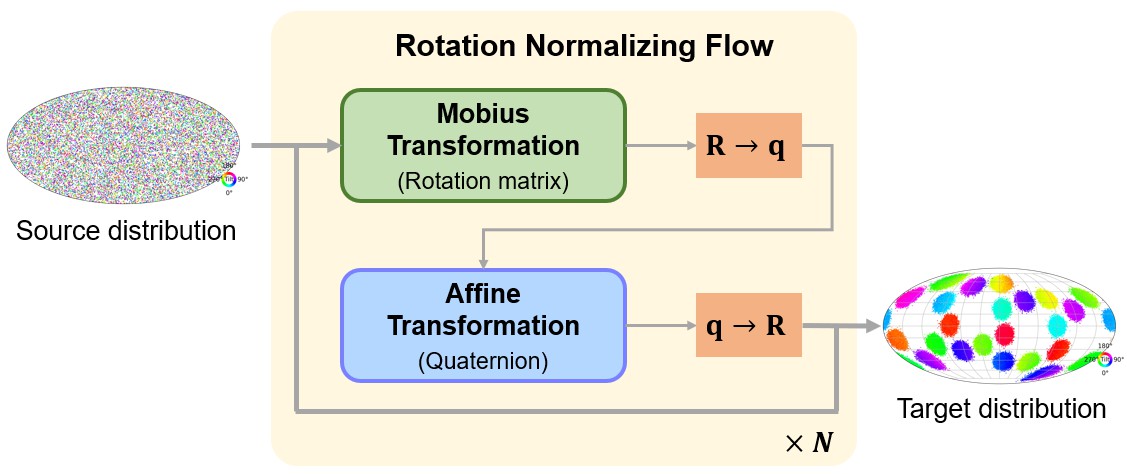
arXiv / project page / code / video A discrete normalizing flow on SO(3) manifold, through which one can not only effectively express arbitrary distributions on SO(3), but also conditionally build the target distribution given input observations. |
|
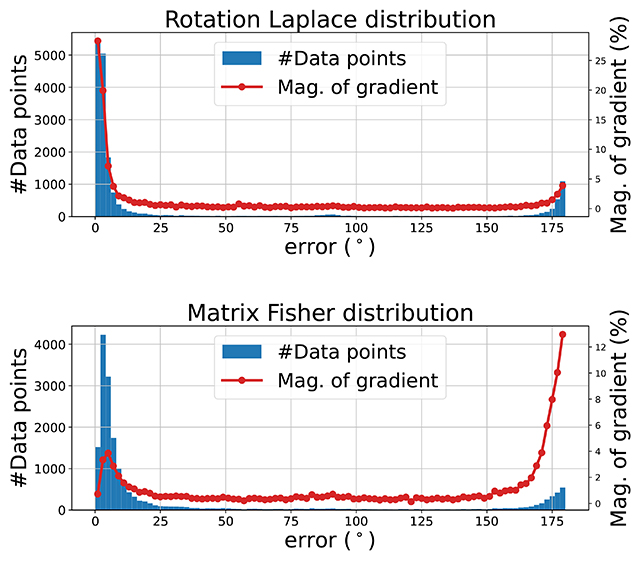
arXiv ICLR / arXiv TPAMI / project page / code A novel Rotation Laplace distribution for probabilistic rotation estimation. Rotation Laplace distribution is robust to the disturbance of outliers and enforces much gradient to the low-error region, resulting in new state-of-the-art performance over both probabilistic and non-probabilistic baselines. |
|
Jue Wang, Leonidas Guibas, Baoquan Chen† * Equal contribution; ordered alphabetically. arXiv / code / video / poster Explicitly model the camera and scene uncertainty components to solve the problem of active camera localization by reinforcement learning. Our algorithm improves over the state-of-the-art Markov Localization based approaches by a large margin on the fine-scale camera pose accuracy. |
|
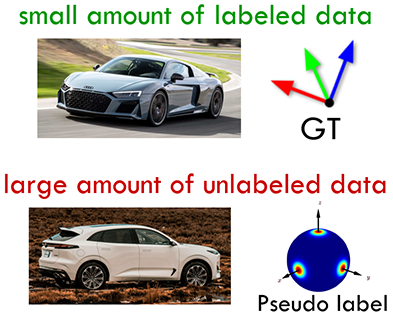
arXiv / project page / code / video / poster
The first general framework for semi-supervised rotation regression. |
|
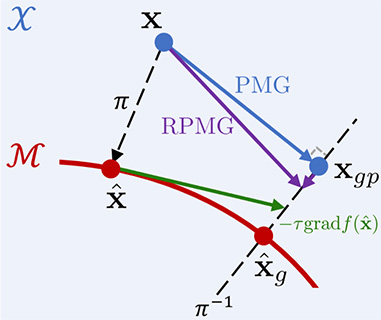
arXiv / project page / code / video / poster Improving the backward pass of deep rotation regression. Leveraging Riemannian optimization, we propose a SO(3) manifold-aware gradient that directly backpropagates into deep network weights. Our plug-and-play gradient layer can be applied to different rotation representations. |
|
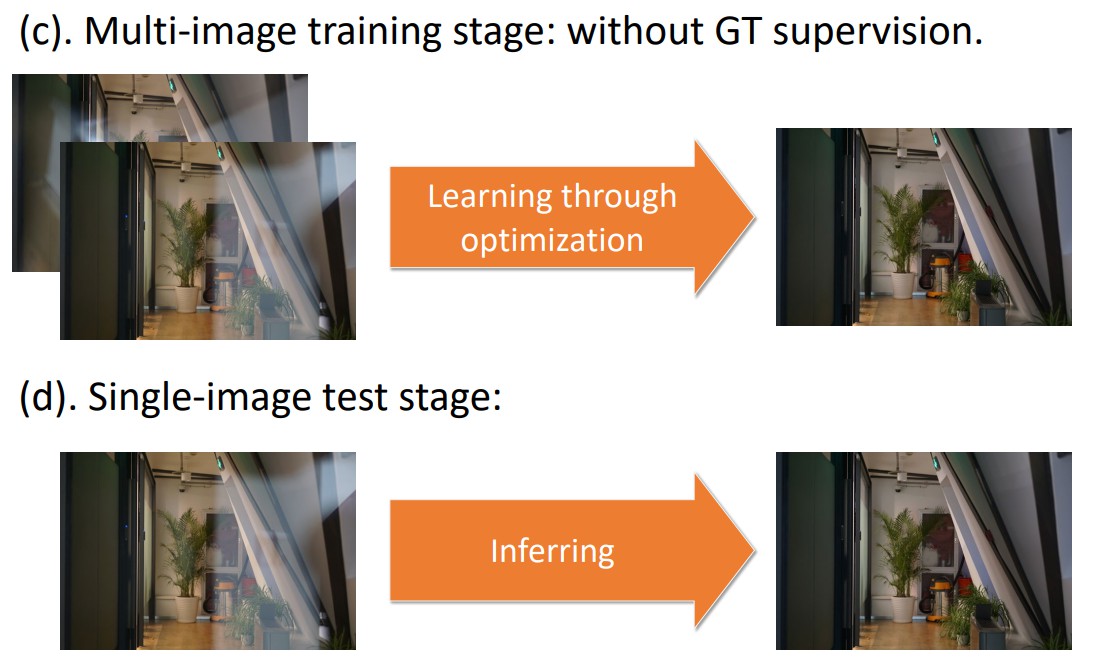
arXiv A learning-based approach that captures the reflection statistical prior for single image reflection removal. Our algorithm is driven by optimizing the target with joint constraints enhanced between multiple input images during the training stage, but is able to eliminate reflections only from a single input for evaluation. |
|
|
|
|
Advisor: Prof. Baoquan Chen 2019.9 - Present |
|
|
2015.9 - 2019.7 Grades: 95.40 (Rank 1/197) |
|
Website template courtesy of Jon Barron. |